Laboratorní zdroj – 5. komunikace po sériové lince
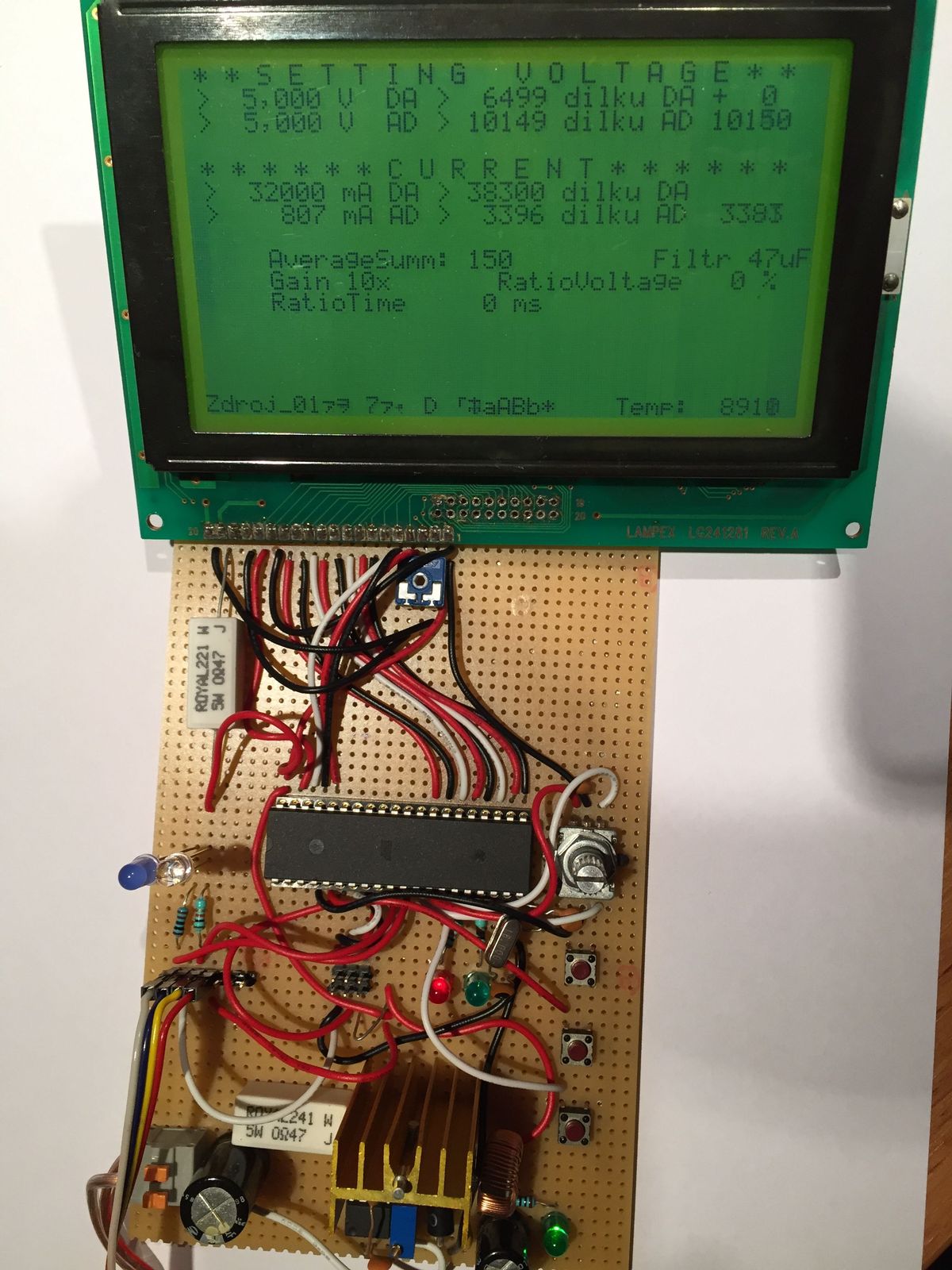
Aby bylo možné komunikovat s podřízeným procesorem na analogové desce laboratorního zdroje, připojil jsem k ní a naprogramoval provizorní řídící desku. Je osazena procesorem ATmega162 a alfanumerickým displejem s rozlišením 16 x 40 znaků. Displej je osazen řadičem HD61830. Rád takovou desku používám pro první oživování nových věcí. Na displej se vejde spousta informací o běžícím programu, takže není potřeba JTAG. Mezivýsledky výpočtů, které programuji, jsou pořád někde zobrazovány a já můžu kontrolovat jejich správnost. Nemusím se starat a do procesoru nahrávat obsáhlou znakovou sadu potřebnou pro řízení barevného displeje, který bude použit později, takže desítky přeprogramovávání při vývoji programu v AVR studiu jsou velmi rychlé. No a na univerzální desku si můžu připájet periferie, které zrovna potřebuji. Teď je na ní jenom stabilizátor, rotační kodér a sériová linka. V konečné verzi zdroje bude použita řídící deska s procesorem ATxmega128 a 4,3″ TFT displej.
V hlavní smyčce programu, kterým ovládám laboratorní zdroj, se věnuji hlavně zobrazování na displeji:
if( RotStatus == 0 ) LCD_Write_String( 0, 0, " * * S E T T I N G V O L T A G E * * " ); else LCD_Write_String( 0, 0, " * * * * * * V O L T A G E * * * * * * " ); LCD_Write_String( 0, 1, " > " ); LCD_Write_Dec16_Point3( VoltageDaMilivolt ); // nastavene napeti pro DA - z rotacniho koderu LCD_Write_String( 9, 1, " V DA" ); LCD_Write_String( 15, 1, " > " ); LCD_Write_Dec16( VoltageDaOutput ); // vypocitane dilky pro DA prevod LCD_Write_String( 23, 1, " dilku DA "); LCD_Write_Signed_Dec8( VoltageDaMilivolt - VoltageAdMilivolt ); LCD_Write_String( 0, 2, " > " ); LCD_Write_Dec16_Point3( VoltageAdMilivolt ); // vypocitane napeti z dilku AD LCD_Write_String( 9, 2, " V AD" ); LCD_Write_String( 15, 2, " > " ); LCD_Write_Dec16( VoltageAdInput ); // namerene dilky AD prevodniku napeti LCD_Write_String( 23, 2, " dilku AD "); LCD_Write_Dec16( VoltageAdInput1 ); // namerene dilky bez prumerovani !!!!!!!!!!!!!!! if( RotStatus == 1 ) LCD_Write_String( 0, 4, " * * S E T T I N G C U R R E N T * * " ); else LCD_Write_String( 0, 4, " * * * * * * C U R R E N T * * * * * * " ); LCD_Write_String( 0, 5, " > " ); LCD_Write_Dec16( CurrentDaMiliamper ); // nastaveny proud pro DA - z rotacniho koderu LCD_Write_String( 9, 5, " mA DA" ); LCD_Write_String( 15, 5, " > " ); LCD_Write_Dec16( CurrentDaOutput ); // vypocitane dilky pro DA prevod LCD_Write_String( 23, 5, " dilku DA "); LCD_Write_String( 0, 6, " > " ); LCD_Write_Dec16( CurrentAdMiliamper ); // vypocitany proud z dilku AD LCD_Write_String( 9, 6, " mA AD" ); LCD_Write_String( 15, 6, " > " ); LCD_Write_Dec16( CurrentAdInput ); // namerene dilky AD prevodniku proudu LCD_Write_String( 23, 6, " dilku AD "); LCD_Write_Dec16( CurrentAdInput1 ); // namerene dilky bez prumerovani !!!!!!!!!!!!!!!
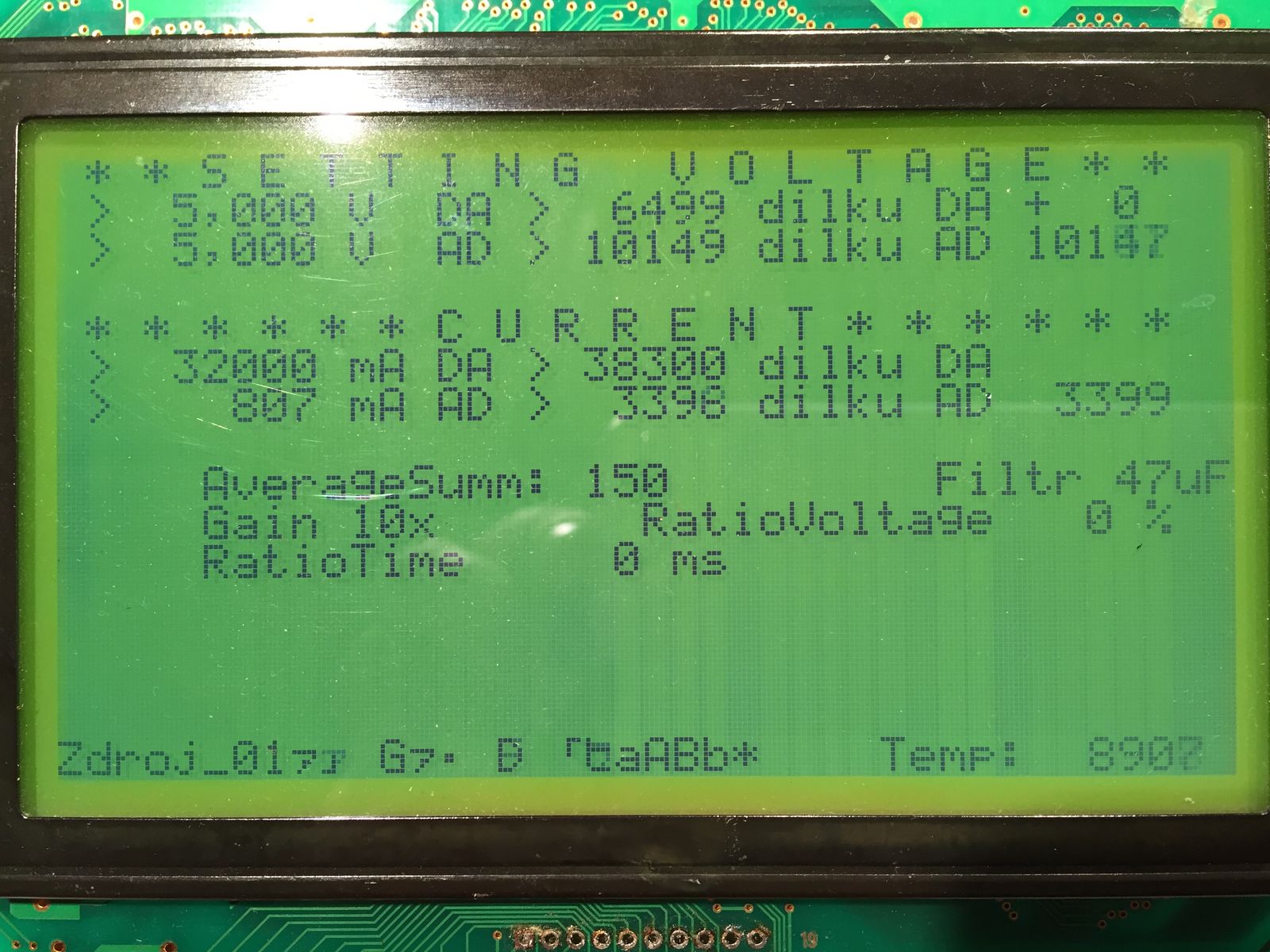
Je potřeba zobrazit napětí nastavené na rotačním kodéru a z něj vypočítaný údaj odesílaný na DA převodník. Ten samozřejmě v budoucnu nebude potřeba, ale teď se hodí. Je potřeba hlídat, jestli dobře funguje rovnice, která hodnotu pro DA převodník počítá. Na dalším řádku je průměrná hodnota z AD převodníku a z něj vypočítané naměřené napětí v milivoltech. Na kraji displeje je ještě rozdíl nastavené a naměřené hodnoty a aktuální číslo z AD převodníku. Podobné údaje se opakují pro nastavení a měření proudu. Ve spodní části displeje jsou další věci, které zrovna programuji. No a na posledním řádku je výpis komunikace mezi procesory – zase pro jistotu, abych na první pohled viděl, že procesory mezi sebou komunikují.
Celé to pak vypadá takto:
Komunikace po sériové lince
Komunikaci bude řídit procesor ATmega162 na řídící desce. Podřízeným procesorem je ATmega16 na analogové desce zdroje. Na začátku komunikace Master vyšle nějaký textový řetězec, ze kterého je zřejmé, pro který procesor je informace určena a od koho se zároveň očekává odpověď. Já zvolil řetězec „Zdroj_01“. Za ním jde skupina dat:
- 16 bitů – 2 bajty: požadované napětí pro DA převodník
- 16 bitů – 2 bajty: požadovaný proud pro DA převodník
- 8 bitů – 1 bajt: nastavení relé, které jsou na desce zdroje
- 8 bitů – 1 bajt: počet měření na AD převodníku, která budou průměrována
- 16 bitů – 2 bajty: záloha
Slave procesor ví, že má přijmout 16 bajtů. Přitom kontroluje textový řetězec, aby bylo možno rozhodnout, že je informace pro něj. Pokud ano, tak přijme všechna data do pole dat SerialRxArray. Z něj budou údaje použity v dalších částech programu. Po přijetí posledního znaku začne slave procesor okamžitě vysílat svoji zprávu pro Master. Začíná stejně, řetězcem „Zdroj_01“ a pokračuje skupinou dat:
- 16 bitů – 2 bajty: aktuální naměřené napětí
- 16 bitů – 2 bajty: aktuální naměřený proud
- 16 bitů – 2 bajty: průměrné naměřené napětí
- 16 bitů – 2 bajty: průměrný naměřený proud
- 16 bitů – 2 bajty: naměřené napětí z teplotního čidla integrovaného v referenčním zdroji
- 8 bitů – 1 bajt: stav zdroje – zdroj napětí nebo proudu
- 40 bitů – 5 bajtů: záloha
Master data přijme a uloží do svého pole přijatých dat SerialRxArray. Vysílání z procesoru Master je řízeno podprogramem přerušení od časovače. Ten spouští vysílání zprávy přibližně 5x za sekundu. Na logickém analyzátoru to vypadá takto:
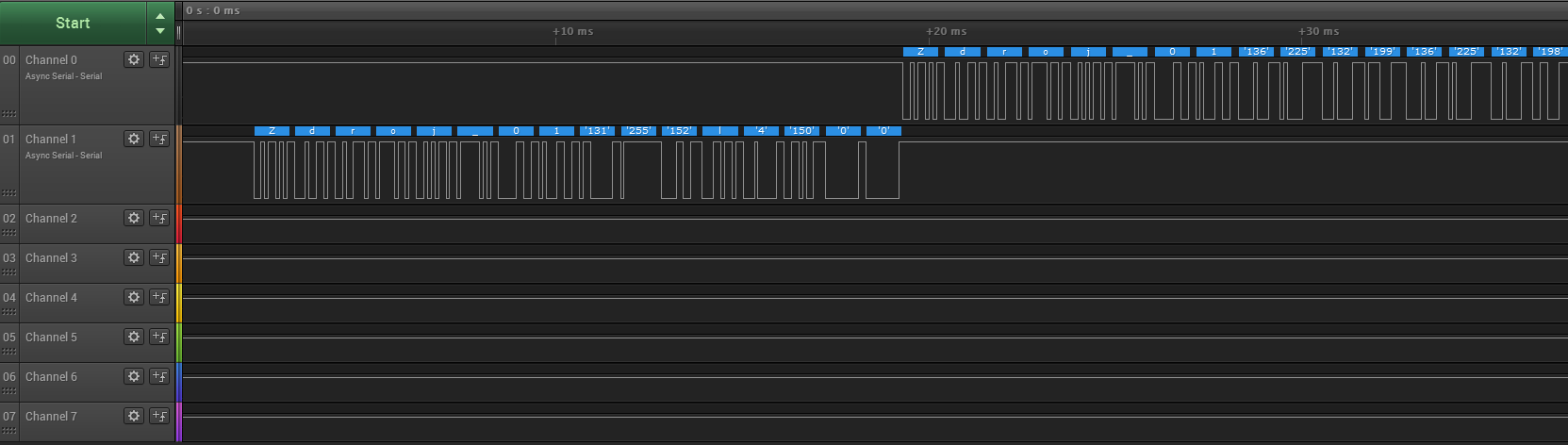
Program přerušení od časovače odešle jednou za 200ms první písmeno řetězce. Po jeho odeslání vznikne požadavek na přerušení od vysílače sériového kanálu, který odesílá zbytek.
ISR(TIMER1_CAPT_vect)
{
SREG = 0x00; // zastavi globalni preruseni
if ( TimCounter == 200 ) // pocita interval 0,2 sekunda k odeslani dat na seriovy kanal
{
TimCounter = 0; // pocitadlo milisekund v casovaci
SerialString = "Zdroj_01";
while ( !( UCSR0A & (1<<UDRE0)));
UDR0 = (*SerialString); // zacatek odesilani
SerialString++;
SerialTxCounter = 0;
}
TimCounter++;
SREG = 0x80; // pusti globalni preruseni
}
Začátek programu přerušení aktivovaný při dokončení odesílání znaku na sériové lince:
ISR(USART0_TXC_vect)
{
if (*SerialString != '\0') // hleda konec retezce
{
UDR0 = *SerialString; // posle dalsi pismeno
SerialString++;
}
else
{
switch (SerialTxCounter)
{
case 0: // horni polovina DA prevodniku napeti
{
UDR0 = (unsigned char) (VoltageDaOutput >> 8);
break;
}
case 1: // spodni polovina DA prevodniku napeti
{
UDR0 = (unsigned char) (VoltageDaOutput);
break;
}
case 2: // horni polovina DA prevodniku proudu
{
UDR0 = (unsigned char) (CurrentDaOutput >> 8);
break;
}
case 3: // spodni polovina DA prevodniku proudu
{
UDR0 = (unsigned char) (CurrentDaOutput);
break;
}
Program přerušení aktivovaný při dokončení přijímání znaku na sériové lince:
ISR(USART0_RXC_vect)
{
LED_G_Set;
SerialRxArray[SerialRxCounter] = UDR0;
switch (SerialRxCounter)
{
case 0: // prijima znaky do pole SerialRxArray, prvni tri znaky kontroluje
{
if(SerialRxArray[0] == 'Z') SerialRxCounter++;
break;
}
case 1:
{
if(SerialRxArray[1] == 'd') SerialRxCounter++;
else
SerialRxCounter = 0;
break;
}
case 2:
{
if(SerialRxArray[2] == 'r') SerialRxCounter++;
else
SerialRxCounter = 0;
break;
}
case 23: // posledni prijaty znak
{
SerialRxCounter = 0;
LED_G_Clr;
break;
}
default:
{
SerialRxCounter++;
break;
}
}
}
Nakonec ještě nastavení registrů mikroprocesoru:
// * * * * * * * * * * * * * * * * * * * * * * * * * Nastaveni preruseni GICR = 0b10000000; // povoleni preruseni INT1 MCUCR = 0b00001010; // aktivace preruseni sestupnou hranou // * * * * * * * * * * * * * * * * * * * * * * * * * Nastaveni casovace T1 TCCR1A = 0b00000010; // Frekvence = F krystal TCCR1B = 0b00011001; // rezim PWM 14 TIMSK = 0b00001000; // preruseni pri preteceni ICR1 = 8000; // 1000 Hz kmitocet PWM // * * * * * * * * * * * * * * * * * * * * * * * * * Nastaveni serioveho kanalu UBRR0H = 0; UBRR0L = 51; // rychlost prenosu 9600 baudu UCSR0B = 0b11011000; // povoleni vysilace a prijimace, preruseni pri vysilani i pri prijmu UCSR0C = 0b10001110; // bez parity, osum bitu
Nastavení registrů v slave procesoru je podobné, oba procesory zatím běží na 8MHz s použitím interních oscilátorů. Předpokládám, že slave procesor začne vysílat okamžitě po přijetí zprávy od masteru. Mezera 200ms dává slave procesoru dostatek času, aby svou zprávu stihl odvysílat a nedošlo ke kolizi.
Laboratorní zdroj – 2. popis zapojení
Laboratorní zdroj – 3. volba součástek
Laboratorní zdroj – 4. návrh modulu zdroje
Laboratorní zdroj – 5. komunikace po sériové lince
Pingback: Laboratorní zdroj – 3. volba součástek – OK2HAZ – Michal Grygárek
Pingback: Laboratorní zdroj – 4. návrh modulu zdroje – OK2HAZ – Michal Grygárek
Pingback: Laboratorní zdroj - 1. úvod
Pingback: Laboratorní zdroj - 2. popis zapojení
Pingback: Laboratorní zdroj – 8. „první“ měření na zdroji – OK2HAZ – Michal Grygárek
Pingback: Laboratorní zdroj - 7. regresní funkce měření napětí
Pingback: Laboratorní zdroj – 9. dynamické vlastnosti zdroje – OK2HAZ – Michal Grygárek
Pingback: Laboratorní zdroj - 6. programování DA a AD převodníku - František Pospíšil
Pingback: Laboratorní zdroj – 13. Závěr – OK2HAZ – Michal Grygárek
Pingback: Laboratorní zdroj – 10. návrh řídící desky MCU – OK2HAZ – Michal Grygárek